0. 前提假设
每次相机拍摄后,将原始图像进行金字塔缩放操作,以获得尺度不变性。
图像金字塔层数nlevels设置为level 0 至 level 7,原始图像为level 0,最深层金字塔图像帧为level 7,共8层;
每层金字塔缩放系数因子scale为1.2;
常识:相机拍摄物体时,近大远小;
相机在参考关键帧 \(RefKF\) 位置首次 "观测/提取/生成" 了一个地图点 \(M\) 。
1. 地图点 观测距离范围
由参考帧在世界坐标系下的光心坐标和地图点 \(M\) 在世界系下的坐标可以算出两者之间的距离 \(dist\) 。
现在假设该距离值为 \(dist=1\) 米。
1 | void MapPoint::UpdateNormalAndDepth() |
由以上信息可以推断:
要想使以后的相机(图像帧)可以再次观测到该地图点 \(M\) ,需要相机与地图点的距离在 [mfMinDistance,mfMaxDistance] 范围内。
分情况讨论:
1. mfMinDistance
假设,参考关键帧 \(RefKF\) (相机首次)"提取/生成"地图点 \(M\) 时的图像金字塔层级是level 0,也即地图点 \(M\) 所对应的特征点在参考帧中原始图像(level 0)中提取而来,且相机光心距离地图点为1米。
那么,相机(图像帧)可以拍摄到该地图点的最小距离为 \(dist_{min}=dist*scale^{level+1-nlevels}=dist*scale^{0+1-8}=1*1.2^{-7}\approx 0.279\) ,
就是说,相机在距离该地图点 \(M\) 大约0.279米时拍摄的图像帧,经过7层缩放的level 7图像帧提取出的该地图点对应的特征点,与相机距离该地图点1米时在原始图像(level 0)提取的该地图点对应的特征点相似。
根据相机拍摄物体时近大远小原则,相机在距离 \(M\) 最近约0.279米时进行的图像金字塔的最深层缩放模拟形成的拍摄效果,类似于相机(参考帧)在距离约1米时对 \(M\) 拍摄的原始图像。
如果相机与 \(M\) 的距离小于0.279米,那么即使使用最深层的金字塔图像帧,也难以模拟出参考帧当时的拍摄效果。
2. mfMaxDistance
假设,参考关键帧 \(RefKF\) (相机首次)"提取/生成"地图点 \(M\) 时的图像金字塔层级是level 7,也即地图点 \(M\) 所对应的特征点在参考帧的最深层金字塔图像帧(level 7)中提取而来,且相机光心距离地图点为1米。
那么,相机(图像帧)可以拍摄到该地图点的最大距离为
\(dist_{max}=dist*scale^{level}=dist*scale^{7}=1*1.2^{7}\approx 3.583\) ,
就是说,相机在距离该地图点 \(M\) 大约3.583米时拍摄的图像帧,在原始图像(level 0)提取出的该地图点对应的特征点,与相机距离该地图点1米时在最深层金字塔图像帧(level 7)提取的该地图点对应的特征点相似。
根据相机拍摄物体时近大远小原则,相机在距离 \(M\) 最远约3.583米时的原始图像形成的拍摄效果,类似于相机(参考帧)在距离约1米时对 \(M\) 拍摄的最深层金字塔图像帧(level 7)。
如果相机与 \(M\) 的距离大于3.583米,那么即使使用原始图像,也难以模拟出参考帧当时的拍摄效果。
2. 预测 地图点 金字塔尺度/层数
1 | /\*\* |
明白了地图点的观测距离范围,PredictScale()就容易理解:
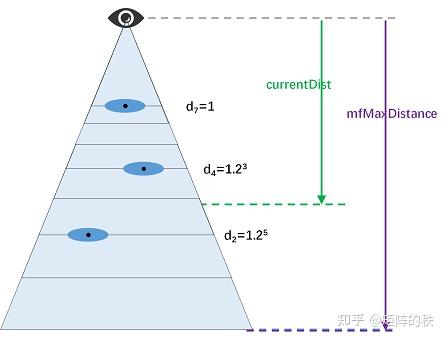
现在假设:在非参考帧外的其他图像帧(如 \(pKF\) )位置又观测/关联到了地图点 \(M\) ,且已知两者之间的距离为 \(currentDist\) (假设其位于观测距离范围内)。
那么,我们可以通过该距离 \(currentDist\) 反向推断,该地图点 \(M\) 最有可能从 \(pKF\) 的哪一层金字塔图像帧上提取而来。其实,这个推断过程与 地图点 观测距离范围 的推断过程正好相反。
例如,如果当前帧 \(pKF\) 的相机光心位置与地图点 \(M\) 的距离 \(currentDist\approx3.583\) 米。那么由第1节(地图点 观测距离范围)反向推理可知,此时观测/关联到地图点 \(M\)的特征点最有可能是从当前帧 \(pKF\)的原始图像(level 0)提取而来的。其他金字塔缩放层提取的特征点所对应的地图点,基本上与 \(pKF\) 之间的距离会远大于3.583米。
这个推断过程用数学表述就是利用mfMaxDistance的公式 反向求解 \(level\) ,即
$dist_{max}=dist*scale^{level}\ =scale^{level}\ level= $
代码中ratio便是 \(\frac{dist_{max}}{dist}\) ,pKF->mfLogScaleFactor即为 \(log(scale)\) 。
故当前帧与地图点的观测近,那么使用的图像金字塔层级便高;
当前帧与地图点的观测远,那么使用的图像金字塔层级便低。
https://blog.csdn.net/ncepu_Chen/article/details/116784652